Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Niciun produs
 Mărește
Mărește






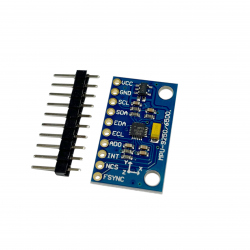
Accelerometru și Giroscop Triaxial LSM6DS33 cu Stabilizator de Tensiune
0104110000014566
Produs nou
Accelerometru și giroscop triaxial LSM6DS33 cu stabilizator de tensiune util pentru a determina înclinația sau accelerația pe toate cele trei axe.
Acest produs nu mai este in stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Caracteristici tehnice:
- Tensiune de alimentare: 2.5V - 5.5V;
- Tensiune de funcționare: 3.3V;
- Consum curent: 2mA;
- Comunicație pe magistrală SPI sau I2C;
- Rezoluție accelerometru: 16 biți/axă;
- Rezoluție giroscop: 16 biți/axă;
- Sensivitate accelerometru: ±2, ±4, ±8, sau ±16 g;
- Sensivitate giroscop: ±125, ±245, ±500, ±1000, sau ±2000°/s;
- Level shifter pentru pinii SDA și SCL.
Dimensiuni: 10 x 23 x 3mm.
Acest produs reprezintă un modul cu accelerometru și giroscop LSM6DS33 util pentru detectarea accelerației pe fiecare axă, dar și a înclinației față de normala la suprafață și de perpendiculara pe normala la suprafață. Acest senzor este unul de înaltă calitate și este proiectat pentru a fi inclus în diferite dispozitive mobile, cum ar fi camere de fotografiat sau smartphone-uri.
Cu ajutorul acestui dispozitiv vă puteți construi proiecte inovative. Acest senzor este unul cu o precizie foarte bună și îl puteți include în proiecte care să numere câți pași faceți, să detecteze daca un obiect cade sau este supus la un șoc, dar vă puteți construi și diferite jocuri care să se folosească de măsurarea înclinației.
Pentru mai multe detalii, consultați pagina producătorului.
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-
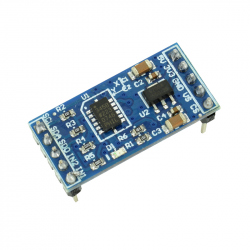
Modul 9DOF...
Modul 9DOF MPU-9255 Accelerometru, Giroscop și...
$14.16
-
Modul...
Modulul cu accelerometru ADXL345 este util...
$3.12
-

Cablu USB OTG
Cablu USB OTG
$0.96
-
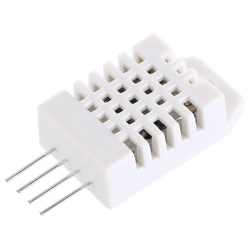
Senzor de...
Senzor de Temperatura și Umiditate DHT22
$5.52
-

LCD 2004 cu...
Modul LCD 5V 20x4
$7.20
-

Motor Pas cu...
Motor Pas cu Pas Plusivo 23HS5628
$21.60
-

$2.40
-

Adaptor de...
Adaptor de la HD Mama la Mini HD Tata
$1.44
-

Roata...
Roata Dintata 2GT-20 cu 16 Dinti
$2.40
-

Sursă...
Sursă de tensiune coborâtoare reglabilă utilă...
$12.00