Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Niciun produs
 Mărește
Mărește




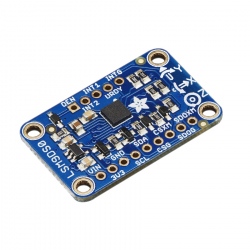
Senzor de Orientare IMU 9-DOF Adafruit BNO055
P2472
Produs nou
Bosch este prima companie care a reușit să implementeze un senzor de orientare cu output stabil pe 3 axe, luând un accelerometru MEMS, un magnetometru și un giroscop și punându-le pe acelasi modul cu un procesor ARM Cortex-M0 de mare viteză pentru a colecta toate datele senzorilor, pentru a rezuma aceste date și cerințele în timp real, și pentru a vă oferi output-ul dorit.
Acest produs nu mai este in stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Descriere și specificații:
În loc să vă petreceți săptămâni sau luni cu algoritmi de precizie și complexitate, puteți avea date semnificative de la un senzor în câteva minute grație acestui senzor BNO055 - un senzor inteligent 9-DOF care face fuziunea senzorilor pe cont propriu.
Senzorul poate emite urmatoarele date:
- Orientare absolută (Euler Vector, 100Hz) - Date de orientare pe trei axe bazate pe o sferă de 360°;
- Orientare absolută (Quaterion, 100Hz) - Ieșire quaternion cu patru puncte pentru o manipulare mai precisă a datelor;
- Vector de viteză unghiulară (100 Hz) - Trei axe pentru "viteză de rotație" în rad/s;
- Vector de accelerație (100 Hz) - Trei axe pentru accelerație (gravitate + mișcare liniară) în m/s^2;
- Vector pentru puterea câmpului magnetic (20Hz) - Trei axe pentru puterea câmpului magnetic detectând în micro Tesla (uT);
- Vector de accelerație liniară (100 Hz) - Trei axe pentru accelerație liniară (accelerație minus gravitație) în m/s^2;
- Vector pentru gravitație (100Hz) - Trei axe pentru accelerație gravitațională (minus orice mișcare) în m/s^2;
- Temperatura (1Hz) - Temperatura ambiantă în grade Celsius;
- Folosește adresa I2C 0x28 (implicită) sau 0x29;
- Greutate: 3g;
- Dimensiuni: 20mm x 27mm x 4mm / 0.8 x 1.1 x 0.2.
Link-uri utile:
Aici puteți găsi un exemplu de utilizare a senzorului.
Documentația este disponibilă în secțiunea Descărcări de mai jos.
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-
Modul...
Modul Adafruit 9-DOF și Senzor de Temperatură...
$35.76
-

Suport...
Suport pentru Axa Liniară SK8
$1.92
-

Cablu XH2.54...
Cablu XH2.54 Mufat la un Singur Capat 10p
$0.36
-

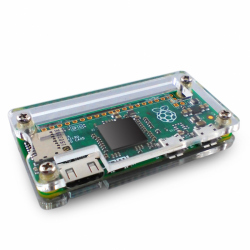
Carcasă...
Carcasă Metalică Argintie pentru Raspberry Pi
$4.80
-
Carcasă de...
Carcasă de Plastic Transparentă pentru...
$4.80
-
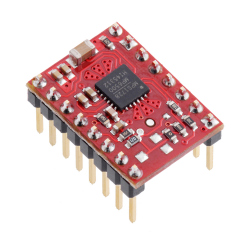
Driver...
Driver pentru Motoare Pas cu Pas Pololu MP6500...
$16.80
-
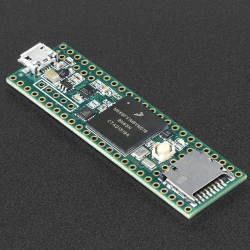
Teensy 3.6
Noua placă de dezvoltare Teensy 3.6 este...
$52.56
-
Senzor de...
Senzor de Distanță Ultrasonic HC-SR04P (3 - 5.5 V)
$1.68
-

LED Roșu de...
LED Roșu de 5 mm cu Lentile Transparente
$0.05
-

Sursă...
Sursă de tensiune coborâtoare reglabilă utilă...
$12.00