Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Niciun produs
 Mărește
Mărește




Servomotor de Metal 12g ES08MA
0104110000007087
Produs nou
Servomotor de cu roată dințată de metal ES08MA ce poate fi folosit pentru o precizie ridicată.
179 bucati in stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Specificații tehnice:
- Tensiune de operare: 4.8V - 6V;
- Curent: 4.8V - 8.8mA, 6V - 9.1mA (în gol);
- Curent în stall: 4.8V - 350mA, 6V - 450mA;
- Viteză: 0.12 s/60º (4.8V), 0.1 s/60º (6V);
- Cuplu: 1.6 kgf·cm (4.8V ), 2 kgf·cm (6V).
Dimensiuni: 23 x 11.5 x 24 mm.
Principalele avantaje ale acestui motor sunt reprezentate de masa de doar 12 grame, dimensiunile mici și roțile dințate de metal.
Servomotoarele sunt folosite în aplicații foarte variate în care este necesară precizia. Acest tip de servomotor este unul foarte des întâlnit, de mici dimensiuni, și îl puteți folosi în aplicații de finețe, unde aveți nevoie de precizie sau la jucării pentru mașinuțe teleghidate pentru a mișca roțile din față în curbe..
Un avantaj față de motoarele stepper este reprezentat de faptul că atunci când sunt în gol, motoarele servo nu consumă curent, dar nici nu pot ține axul blocat.
Utilizare împreună cu Arduino
Dacă servomotorul este comandat să se poziționeze la un anumit unghi, dar din cauza inerției se va roti puțin mai mult decât s-a dorit, circuitul de comandă din interiorul servomotorului va sesiza această problemă prin intermediul potențiometrului ce măsoară poziția acestuia și va corecta rapid eroarea. De asemenea, dacă vom încerca să schimbăm forțat (mecanic) poziția la care servomotorul a fost setat, acesta va opune rezistență. Aceste calități fac servomotoarele ideale pentru aplicații în care este nevoie de control precis, precum brațe robotice.
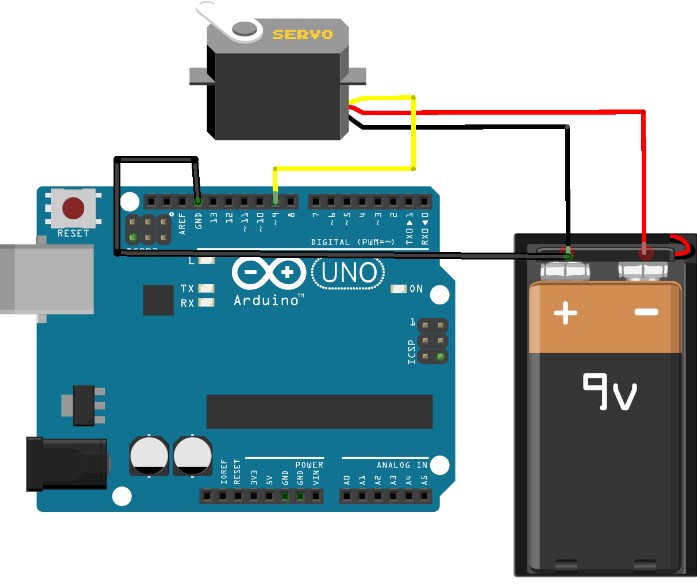
Există trei fire pentru conexiune: GND, 5V și un fir pentru comandă, pe care îl vom conecta la un pin PWM de pe plăcuța Arduino. Ca și în cazul motoarelor DC, nu se recomandă alimentarea direct din plăcuța Arduino. Noi vom folosi o baterie de 9 V. Atenție, borna negativă a bateriei trebuie legată la GND-ul plăcuței.
De cele mai multe ori, terminalele servomotorului vor respecta codul din figura de mai jos (galben – control, negru – GND, roșu – alimentare). Pentru a verifica acest lucru și pentru a vedea alți parametrii caracteristici motorului vostru, puteți vedea fișa tehnică oferită de producător. În aceasta veți găsi și alte informații, precum viteza de rotație, cuplu și tensiunea de alimentare recomandată.
Pentru codul 15.0, vezi cartea "Introducere in Arduino"
https://www.optimusdigital.ro/altele/1676-carte-introducere-in-arduino.html
Probabil cel mai mare avantaj oferit de Arduino este comunitatea sa open-source, cu numeroasele exemple și biblioteci. Pentru controlul servomotorului folosim biblioteca Servo.h. Acesta ne permite să declarăm până la 8 obiecte de tipul Servo și să folosim funcțiile aferente acestor obiecte precum attach(pin) pentru a indica obiectului cu ce pin comunică sau write(poziție) pentru a controla direct poziția servo-ului (pe pinul indicat de metoda attach() se va genera un PWM ce comandă servomotorul).
Deci, un obiect în limbajele de programare reprezintă o instanță (variabilă de un anumit tip) ce poate avea date și funcții (metode) specifice.
Programul anterior controlează servomotorul pentru a obține mișcări de la 0 la 180 de grade, în ambele sensuri.
Folosind un kit mecanic pentru poziționare pe 2 axe (vezi imaginea de mai jos) și două servomotoare, ați putea construi ușor un braț robotic. Puteți folosi un joystick pentru controlul acestuia.
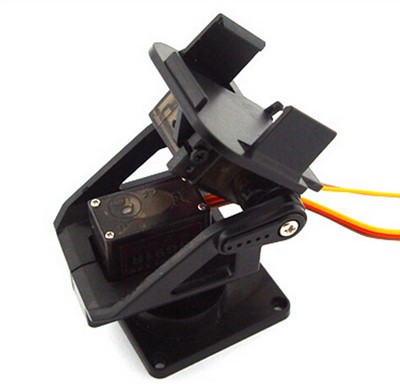
Sistem de poziționare pe două axe
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-

Roată...
Roată Dințată din Plastic Albastră M0.5 pentru...
$0.84
-

Placa de...
Placa de încălzire PCB 214x214 mm pentru...
$8.40
-

Adaptor USB...
Adaptor USB 3.2 Tip C Argintiu
$1.20
-

Lupă cu...
Lupă cu Cleştişori pentru a va elibera mainile...
$6.00
-
Registru de...
Registru de Deplasare CD4094BE
$0.72
-

Motor Pas cu...
Motor pas cu pas de 6 mm cu tijă filetată...
$9.36
-

Buzzer Activ...
Buzzer Activ foarte util în proiectle...
$0.24
-

Breloc Mov...
Breloc Mov cu Eticheta RFID
$0.33
-

Duză pentru...
Cap pentru Imprimante 3D 0.4/1.75
$1.14
-

Elice Verde...
Elice Verde de 40 mm
$0.36