Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
No products
") View larger
View larger
")
")
")
")
")
")
")
")
")
")
")
6.3:1 Metal Gearmotor 37Dx50L mm 12V (Helical Pinion)
0104110000070289
New product
This gearmotor is a powerful brushed DC motor with 6.25:1 metal gearbox intended for operation at 12 V. The gearbox is composed mainly of spur gears, but it features helical gears for the first stage for reduced noise and improved efficiency. These units have a 16 mm-long, 6 mm-diameter D-shaped output shaft. This gearmotor is also available with an integrated encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
| 12 V | 1600 RPM, 150 mA | 3.0 kg⋅cm (42 oz⋅in), 5.5 A |
See Description for more details about the product.
Don't delay, buy today. Add to cart now!
This product is no longer in stock
- Write a review
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
More info
Overview
Measuring 37 mm (1.46") in diameter, these brushed DC gearmotors are the largest and most powerful we carry. They are available in a range of gear ratios from 6.3:1 to 150:1 and with 12 V or 24 V motors, and all versions are available with integrated 64 CPR quadrature encoders on the motor shafts. The 12 V and 24 V motors offer approximately the same performance at their respective nominal voltages, with the 24 V motor drawing half the current of the 12 V motor. See the 37D metal gearmotor datasheet (2MB pdf) for more information, including detailed performance graphs for each gearmotor version. These powerful brushed DC gearmotors are available in a variety of different gear ratios. Versions with an integrated quadrature encoder are also available, including just the motor and encoder portion by itself (no gearbox). A more basic comparison table is available below.
| Rated Voltage | Stall Current | No-Load Current | Gear Ratio | No-Load Speed (RPM) | Extrapolated Stall Torque | Max Power (W) |
Without Encoder |
With Encoder |
|
| (kg ⋅ cm) | (oz ⋅ in) | ||||||||
| 12 V | 5.5 A | 0.15 A | 1:1 (no gearbox) | 10,000 |
0.5 |
7 | - | - | 0104110000070401 |
| 6.3:1 | 1600 | 3.0 | 42 | 12 | 0104110000070289 | 0104110000070395 | |||
| 10:1 | 1000 | 4.9 | 68 | 12 | 0104110000070296 | 0104110000070388 | |||
| 19:1 | 540 | 8.5 | 120 | 12 | 0104110000065957 | 0104110000065940 | |||
| 30:1 | 330 | 14 | 190 | 12 | 0104110000065971 | 0104110000065964 | |||
| 50:1 | 200 | 21 | 290 | 10 | 0104110000065995 | 0104110000065988 | |||
| 70:1 | 150 | 27 | 380 | 8 | 0104110000066015 | 0104110000066008 | |||
| 100:1 | 100 | 34 | 470 | 8 | 0104110000066039 | 0104110000066022 | |||
| 131:1 | 76 | 45 | 630 | 6 | 0104110000066053 | 0104110000066046 | |||
| 150:1 | 67 | 49 | 680 | 6 | 0104110000066077 | 0104110000066060 | |||
/a.jpg)
/b.jpg)
* Output power for these units is constrained by gearbox load limits; spec provided is output power at max recommended load of 10
Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. In order to avoid damaging the gearbox, we recommend keeping continuously applied loads under 10 kg-cm (150 oz-in), and the recommended upper limit for instantaneous torque is 25 kg-cm (350 oz-in). Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
In general, these kinds of motors can run at voltages above and below the nominal voltages; lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
The gearboxes are composed mainly of spur gears, but they feature helical gears for the first stage for reduced noise and improved efficiency:
/c.jpg)
37D Gearmotor (Helical Pinion) with the gearbox removed showing the helical pinion gear and first mating gear.
Details
/d.jpg)
/e.jpg)
/f.jpg)
This gearmotor is a powerful brushed DC motor with 6.25:1 metal gearbox intended for operation at 12 V. The gearbox is composed mainly of spur gears, but it features helical gears for the first stage for reduced noise and improved efficiency. These units have a 16 mm-long, 6 mm-diameter D-shaped output shaft. This gearmotor is also available with an integrated encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
| 12 V | 1600 RPM, 150 mA | 3.0 kg⋅cm (42 oz⋅in), 5.5 A |
Dimensions
/g.jpg)
Dimensions of the 37D mm metal gearmotor (without encoder). Units are mm over [inches].
This diagram is also available as a downloadable PDF (459k pdf).
Warning: Do not screw too far into the mounting holes as the screws can hit the gears. We recommend screwing no more than 3mm (0.12") into the screw hole.
Gearmotor accessories
The face plate has six mounting holes evenly spaced around the outer edge threaded for M3 screws. These mounting holes form a regular hexagon and the centers of neighboring holes are 15.5 mm apart. We have two brackets for these gearmotors: a stamped aluminum L-bracket (sold in pairs) and a sturdier, tombstone-style machined aluminum bracket (sold individually):
/h.jpg)
37D mm gearmotor (without encoder) with L-bracket and 6mm universal mounting hub.
/i.jpg)
Pololu machined aluminum bracket for 37D mm metal gearmotors mounting a motor to a clear piece of acrylic.
The 6 mm diameter gearbox output shaft works with the Pololu universal aluminum mounting hub for 6mm shafts, which can be used to mount our larger Pololu wheels (80mm- and 90mm-diameter) or custom wheels and mechanisms to the gearmotor’s output shaft as shown in the left picture below. Alternatively, you could use our 6mm scooter wheel adapter to mount many common scooter, skateboard, and inline skate wheels to the gearmotor’s output shaft as shown in the right picture below:
/j.jpg)
Black Pololu Wheel 90x10mm on a Pololu 37D mm Metal Gearmotor.
/k.jpg)
A 37D mm gearmotor connected to a scooter wheel by the 6 mm scooter wheel adapter.
For a general-purpose hex adapter, consider our 12mm hex wheel adapter (also available in an extended version), which lets you use these motors with many common hobby RC wheels, including Dagu Wild Thumper Wheels:
/l.jpg)
12mm Hex Wheel Adapter for 6mm Shaft connecting a Wild Thumper Wheel to a 37D mm Metal Gearmotor.
We have a number of motor drivers and motor controllers that work with these 37D mm metal gearmotors. We generally recommend our High-Power Motor Drivers, which are available in various power levels and versions, including some dual-channel shields for Arduino and dual-channel expansion boards for Raspberry Pi. Additionally, our VNH5019-based motor drivers, which are also available as single and dual carriers, are a good match for these gearmotors.
/n.jpg)
Pololu Dual G2 High-Power Motor Driver 24v14 Shield for Arduino.
/o.jpg)
Pololu Dual G2 High-Power Motor Driver 24v14 for Raspberry Pi (assembled version) with included hardware.
/p.jpg)
Pololu dual VNH5019 motor driver shield for Arduino.
If you are looking for higher-level control interfaces, such as USB, RC, analog voltages, I2C, or TTL serial, consider our Simple Motor Controllers, Jrk motor controllers, or RoboClaw motor controllers; these controllers are available in various power levels several of which can handle these 37D mm metal gearmotors (we generally recommend a motor controller that can handle continuous currents above the stall current of your motor).
High-Power Simple Motor Controller G2 18v15.
Jrk G2 21v3 USB Motor Controller with Feedback.

RoboClaw 2×7A Motor Controller (V5B) in its included case.
We have an assortment of Hall effect-based current sensors to choose from for those who need to monitor motor current:
ACS711EX current sensor carrier -15.5A to +15.5A.
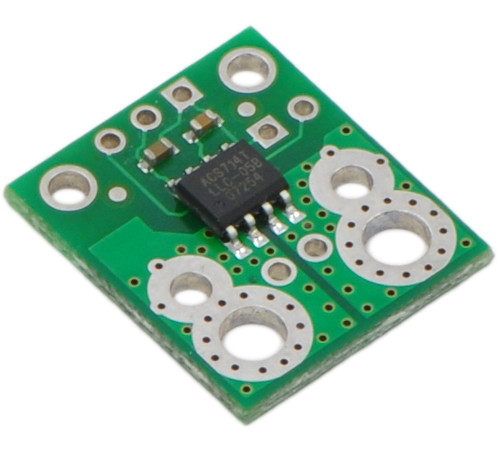
ACS714 current sensor carrier -5A to +5A.
Selecting the right gearmotor
We offer a wide selection of metal gearmotors that offer different combinations of speed and torque.
/07.jpg)
Specifications
Dimensions
| Size: | 37D x 50L mm1 |
| Weight: | 175 g |
| Shaft diameter: | 6 mm2 |
General specifications
| Gear ratio: | 6.25:1 |
| No-load speed @ 12V: | 1600 rpm |
| No-load current @ 12V: | 0.2 A |
| Stall current @ 12V: | 5.5 A3 |
| Stall torque @ 12V: | 3.0 kg·cm3 |
| Max output power @ 12V: | 12 W |
| No-load speed @ 6V: | 800 rpm4 |
| No-load current @ 6V: | 0.15 A4 |
| Stall current @ 6V: | 3.0 A4 |
| Stall torque @ 6V: | 1.7 kg·cm4 |
| Motor type: | 12V |
Performance at maximum efficiency
| Max efficiency @ 12V: | 47 % |
| Speed at max efficiency: | 1300 rpm |
| Torque at max efficiency: | 0.49 kg·cm |
| Current at max efficiency: | 1.2 A |
| Output power at max efficiency: | 6.4 W |
General specifications
| Encoders?: | N |
Notes:
1 Length measurement is from gearbox face plate to back of motor (it does not include the output shaft or motor terminals). See dimension diagram for details.
2 D shaft.
3 Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
4 This motor will run at 6 V but is intended for operation at 12 V.
Don't delay, buy today.
Add to cart now!
Reviews
Customers who bought this product also bought:
-

Cynel Solder...
Cynel Solder 100 g 1 mm
$10.71
-

12 V...
12 V 50x50x12 mm Fan
$1.92
-

9v Battery...
This product is used to connect a 9 volt...
$0.31
-

Neodymium...
Neodymium Block Magnet 35x12x10 Thick N45 See...
$6.00
-

Plusivo...
The Plusivo soldering station is ideal for a...
$35.76
-

Pololu...
This machined aluminum gearmotor bracket lets...
$9.60
-

17HS4401...
This NEMA 17HS4401 bipolar stepper motor has a...
$8.16
-
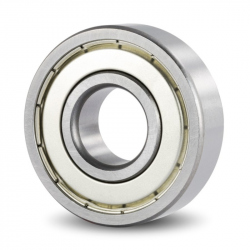
688ZZ...
688ZZ Bearing (8 x 16 x 5 mm)
$0.42
-

M5 Nut
M5 Nut is intended to give the user a simple...
$0.03
-

Neodymium...
Neodymium Disc Magnet 12x10 Thick N38 See...
$1.44