Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Niciun produs
 Mărește
Mărește











Motor Pololu cu Reductor Metalic 20.4:1 și Codor 48 CPR HP 6V 25Dx63L mm
0104110000070159
Produs nou
Motor Pololu cu Reductor Metalic 20.4:1 și Codor 48 CPR HP 6V 25Dx63L mm
Acest produs nu mai este in stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Motor Pololu cu Reductor Metalic 20.4:1 și Codor 48 CPR HP 6V 25Dx63L mm
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-
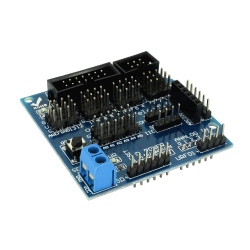
Placa de...
Placa de expansiune Sensor Shield utilă pentru...
$2.71
-

Set...
Set Șurubelnițe 45-în-1
$11.47
-
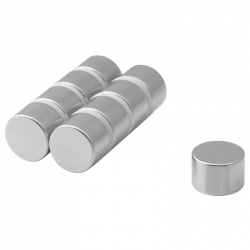
Magnet Disc...
Magnet Disc din Neodim 15x10 mm N38 Pentru mai...
$1.92
-

Magnet Disc...
Neodymium disc magnet 4x3 thick N38 Pentru mai...
$0.36
-

Rulment KP08...
Rulment KP08 cu Diametru Intern 8 mm
$1.68
-

Pololu Wheel...
Pereche Roți Albe Pololu 80x10 mm
$11.52
-

Magnet Disc...
Magnet Disc din Neodim 3x6 mm N38 Pentru mai...
$0.38
-

Bandă de...
Bandă de Poliamidă Rezistentă la Căldură pentru...
$14.40
-

Fludor cu...
Fludor cu Diametrul de 1.5 mm (250 g)
$11.76
-
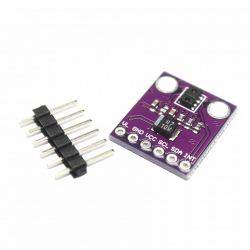
Senzor de...
APDS-9930 ce oferă senzor pentru lumina...
$3.60