Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
No products
") View larger
View larger
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
")
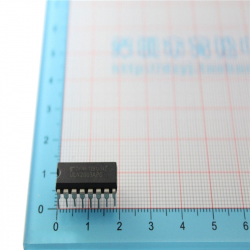
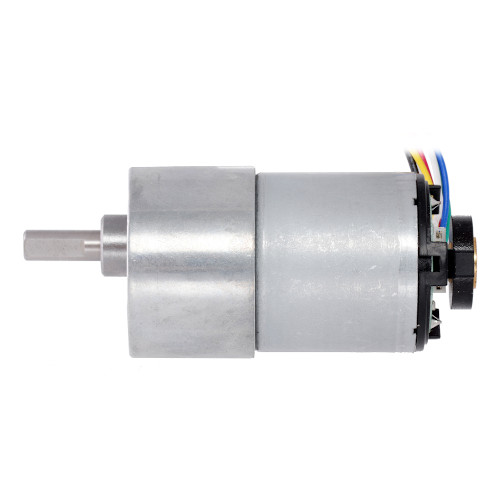
30:1 Metal Gearmotor 37Dx68L mm with 64 CPR Encoder (Helical Pinion)
0104110000065964
New product
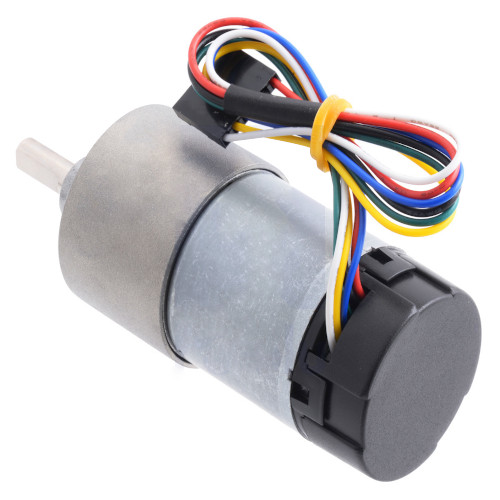
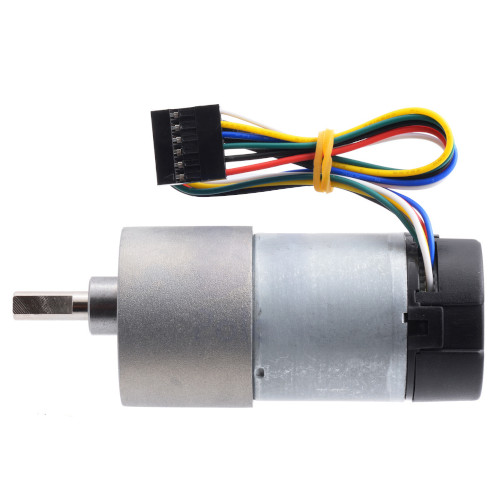
This gearmotor is a powerful 12V brushed DC motor with a 30:1 metal gearbox and an integrated quadrature encoder that provides a resolution of 64 counts per revolution of the motor shaft, which corresponds to 1920 counts per revolution of the gearbox’s output shaft. The gearbox is composed mainly of spur gears, but it features helical gears for the first stage for reduced noise and improved efficiency. These units have a 16 mm-long, 6 mm-diameter D-shaped output shaft. This gearmotor is also available without an encoder.
Key specifications:
| voltage | no-load performance | stall extrapolation |
| 12 V | 540 RPM, 150 mA | 8.5 kg⋅cm (120 oz⋅in), 5.5 A |
See description for more details about the product.
Add to cart now!
1 Item
Warning: Last items in stock!
- Write a review
- Remove this product from my favorite's list.
- Add this product to my list of favorites.
More info
Overview
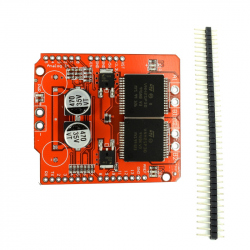
These powerful brushed DC gearmotor are available in a variety of different gear ratios and feature integrated quadrature encoders with 64 counts per revolution (CPR) of the motor shaft. The motor and encoder portion is available by itself (no gearbox), and versions without the encoder are also available.
| Rated Voltage |
Stall Current |
No-Load Current |
Gear Ratio | No-Load Speed (RPM) |
Extrapolated Stall Torque |
Max Power (W) |
Without Encoder |
With Encoder |
|
| (kg ⋅ cm) | (oz ⋅ in) | ||||||||
| 12 V |
5.5 A |
0.15 A |
1:1 (no gearbox) | 10,000 | 0.5 | 7 | - | - | item #4750 |
| 19:1 | 540 | 8.5 | 120 | 12 | item #4741 | item #4751 | |||
| 30:1 | 330 | 14 | 190 | 12 | item #4742 | item #4752 | |||
| 50:1 | 200 | 21 | 290 | 10 | item #4743 | item #4753 | |||
| 70:1 | 150 | 27 | 380 | 10 | item #4744 | item #4754 | |||
| 100:1 | 100 | 34 | 470 | 8 | item #4745 | item #4755 | |||
| 131:1 | 76 | 45 | 630 | 6 | item #4746 | item #4756 | |||
| 150:1 | 67 | 49 | 680 | 6 | item #2829 | item #2828 | |||


Note: Stalling or overloading gearmotors can greatly decrease their lifetimes and even result in immediate damage. In order to avoid damaging the gearbox, we recommend keeping continuously applied loads under 10 kg-cm (150 oz-in), and the recommended upper limit for instantaneous torque is 25 kg-cm (350 oz-in). Stalls can also result in rapid (potentially on the order of seconds) thermal damage to the motor windings and brushes; a general recommendation for brushed DC motor operation is 25% or less of the stall current.
These motors are intended for use at 12 V, though in general, these kinds of motors can run at voltages above and below the nominal voltage (they can begin rotating at voltages as low as 1 V). Lower voltages might not be practical, and higher voltages could start negatively affecting the life of the motor.
The gearboxes are composed mainly of spur gears, but they feature helical gears for the first stage for reduced noise and improved efficiency:

37D Gearmotor (Helical Pinion) with the gearbox removed showing the helical pinion gear and first mating gear.
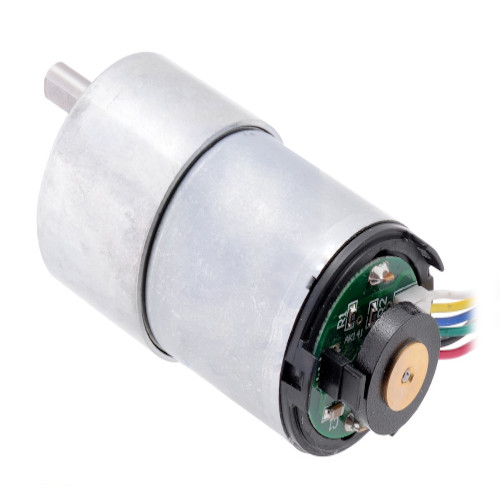
The encoder portion is protected by a black plastic end cap:
The end cap is easily removable if you need to access the encoder or want to slightly reduce the overall gearmotor size, but there is a little bit of base plastic that will remain, as shown in the pictures below:
Specifications
Dimensions
| Size: | 37D x 68L mm1 |
| Weight: | 200 g |
| Shaft diameter: | 6 mm2 |
General specifications
| Gear ratio: | 30:1 |
| No-load speed @ 12V: | 330 rpm |
| No-load current @ 12V: | 0.2 A |
| Stall current @ 12V: | 5.5 A3 |
| Stall torque @ 12V: | 14 kg·cm3 |
| Max output power @ 12V: | 12 W |
| No-load speed @ 6V: | 170 rpm4 |
| No-load current @ 6V: | 0.15 A4 |
| Stall current @ 6V: | 3.0 A4 |
| Stall torque @ 6V: | 7.9 kg·cm4 |
| Motor type: | 12V |
Performance at maximum efficiency
| Max efficiency @ 12V: | 54 % |
| Speed at max efficiency: | 280 rpm |
| Torque at max efficiency: | 1.8 kg·cm |
| Current at max efficiency: | 0.78 A |
| Output power at max efficiency: | 5.1 W |
Notes:
1 Length measurement is from gearbox face plate to back of encoder cap (it does not include the output shaft). See dimension diagram for details.
2 D shaft.
3 Stalling is likely to damage the gearmotor. Stall parameters come from a theoretical extrapolation of performance at loads far from stall. As the motor heats up, as happens as it approaches an actual stall, the stall torque and current decrease.
4 This motor will run at 6 V but is intended for operation at 12 V.
5 May vary by a few centimeters.