Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Coş
0
Produs
Produse
(gol)
Niciun produs
Urmeaza a se stabili
Livrare
$0.00
Total
Produs adăugat cu succes la coşul dvs.
Cantitate
Total
0 articole în coșul dvs.
Aveţi un produs în coş.
Total produse:
Total livrare
Urmeaza a se stabili
Total
Reduceri!
") Mărește
Mărește
Mărește
")
")
")
")
")
")
")
")
Imaginile sunt utilizate exclusiv cu titlu de prezentare. Fotografiile nu creează obligații contractuale.
Șasiu de Robot Balboa cu Kit Stabilitate (fără motoare, roți sau părți electronice)
0104110000070548
Produs nou
Șasiu de Robot Balboa cu Kit Stabilitate (fără motoare, roți sau părți electronice)
Acest produs nu mai este in stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Șasiu de Robot Balboa cu Kit Stabilitate (fără motoare, roți sau părți electronice)
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-

Kit Bumper...
Kit Bumper Cage pentru Robot Balboa
$12.00
-
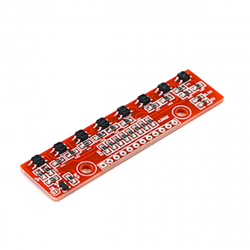
Matrice de...
Matrice de senzori infraroșu reflectivi (8...
$7.20
-
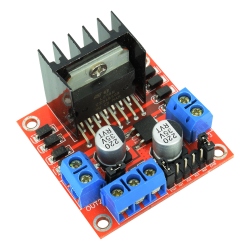
Modul cu...
Modul cu driver de motoare L298N ideal pentru...
$2.64
-

Placă de...
Placa de dezvoltare compatibila cu Arduino...
$6.00