Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Niciun produs
") Mărește
Mărește
")
")
")
")
")
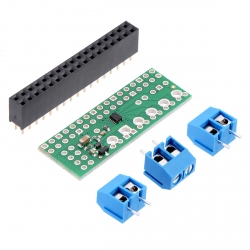
Driver de motoare Pololu G2 18v18 pentru Raspberry Pi (asamblat)
0104110000047168
Produs nou
Cu ajutorul acestui modul, puteți controla două motoare DC cu Raspberry Pi. Suportă tensiuni de la 6.5V la 30V și un curent de maxim 18A fără răcire suplimentară. Modulul este asamblat, nu necesită lipituri.
1 bucata in stoc
Ultimele bucăți în stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Descriere și specificații:
Driver-ul G2 are la bază două punți H MOSFET mulțumită cărora poate controla două motoare DC de mare putere. Este compatibil cu Raspberry Pi începând cu modelul B+, până la noile modele Pi 3 Model B și Model A+.
Tensiunea minimă de lucru este de 6.5V. Driver-ul are, de asemenea, un regulator de 5V, 2.5A pentru a alimenta Raspberry în timp ce acesta este conectat la el.
În configurația standard, driver-ul folosește 6 pini GPIO pentro controlul motoarelor (folosind pinii PWM ai Raspberry) și 2 pini adiționali pentru citirea stării ieșirilor. Harta de pini poate fi configurată după preferințele dumneavoastră.
Acest driver este compatibil cu versiunile mai noi de Raspberry Pi, cu 40 pini GPIO Model B+, Model A+, Raspberry Pi 2 Model B, și Raspberry Pi 3 Model B. Modulul este asemănător cu Raspberry Pi HAT dar nu îndeplinește toate funcțiile acestuia deoarece nu dispune de EEPROM.
- Tensiuni de lucru de la 6.5V la 30V (maxim 30V, nu este recomandată folosirea cu baterii de 24V);
- Curent de ieșire 18A, continuu;
- Limitare curent;
- PWM cu frecvențe de până la 100 kHz;
- Indicator LED pentru ieșiri;
- Regulator de 5V, 2.5A pentru alimentarea Raspberry Pi (și folosirea unei singure alimentări);
- Protecție la inversarea tensiunii;
- Oprire automată la sub-tensiune;
- Protecție la scurt-circuit.
Această versiune este complet asamblată, cu pinheader 2x20, 0.1 inch, tip mamă și 6x5mm conexiuni pentru motoare.
De asemenea, sunt incluse 4 distanțiere M2.5 cu lungime 11m, șuruburi și piulițe pentru conectarea ușoară și stabilă la Raspberry Pi.
Documente utile în secțiunea Descărcări de mai jos.
Raspberry Pi din poze nu este inclus.
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-

Motor Pololu...
Motor Pololu cu Reductor Metalic 34:1 și Codor...
$30.96
-
Raspberry Pi...
Produs Original
$8.28
-

Sursă Pololu...
Sursă Pololu Step-Down D24V10F5 de 5 V, 1 A...
$15.84
-
Kit Driver...
Kit driver de motoare Pololu DRV8835 pregătit...
$9.36
-

Controller...
Controller de Motoare de Putere Pololu G2 18v15
$119.76
-

Driver de...
Driver de Motoare DC 10Amp 5V-30V
$15.60
-

Modul Slot...
Modulul este un adaptor compatibil cu MicroSD,...
$1.05
-

Header de...
Header de Pini 2.54 mm pentru Raspberry Pi Zero...
$0.96
-

Header de...
40 de pini care pot fi taiati la dimensiunea...
$0.24
-
Modul cu 2...
Modulul cu 2 relee este util pentru controlul a...
$1.88