Dupa plasarea solicitării de comandă, in sectiunea Istoric puteti vedea cate solicitări de comandă mai avem de procesat inaintea dumneavoastra
Program de lucru: Luni - Vineri 9:00 - 18:00, pauza 13:00 - 14:00.
Se efectueaza lucrari de mentenanta la site si pot aparea erori. In cazul in care intampinati erori va rugam sa reincercati mai tarziu.
Ridicarea personala este disponibila pentru comenzile achitate in avans. Se pot ridica dupa ce sunt pregatite.
Niciun produs
 Mărește
Mărește











Pololu Driver pentru Motoare Pas cu Pas de Mare Putere 36v4
0104110000061843
Produs nou
Pololu Driver pentru Motoare Pas cu Pas de Mare Putere 36v4
Acest produs nu mai este in stoc
- Scrie o recenzie
- Elimina acest produs din lista mea de favorite.
- Adauga acest produs la lista mea de favorite.
- Imprimă
Informații
Pololu Driver pentru Motoare Pas cu Pas de Mare Putere 36v4
Recenzii
Clienții care au cumpărat acest produs au mai cumpărat:
-

Filament...
Filament pentru Imprimanta 3D 1.75 mm PLA 1 kg...
$16.80
-
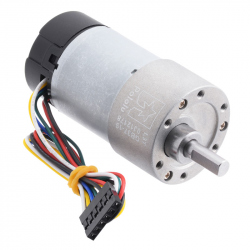
Motor cu...
Motor cu reductor 50:1 37Dx70L mm cu encoder 64...
$75.36
-
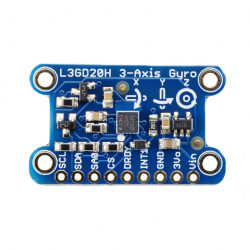
Modul...
Un giroscop este un tip de senzor care poate...
$19.20
-
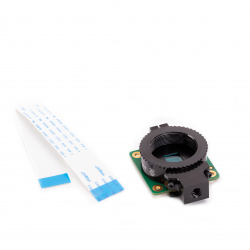
Cameră HQ...
Produs Original Cameră HQ de la Raspberry,...
$64.69
-

Raspberry Pi...
Produs Original Cea mai nouă serie de plăci...
$72.58
-
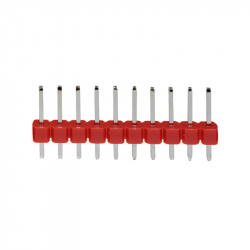
Header de...
Header de Pini Tată de 2.54 mm 10p (Roșu)
$0.12
-
Cablu 6p...
Cablu 6p 1.25 mm Mufat la Ambele Capete (10 cm)
$0.38
-

Micro...
Micro Servomotor SG90 180° util pentru...
$2.88
-

Șurub cu Cap...
Șurub cu Cap Hexagonal M4x35 mm
$0.24
-

Kit Gheară...
Kit-ul gheară robotică de prindere este un kit...
$16.80